
- S-AWC — Миф или реальность
- Активация sawc митсубиси аутлендер 3
- Активация скрытых функций на Renault Arkana
- ECO-Mode на Mitsubishi Outlander 3
- Упрощённая система полного привода S-AWC для Mitsubishi Outlander 2.0 (2.4)
- Бесплатное удаление катализаторов в Екатеринбурге
- Chipanem.ru / Чип-тюнинг в Екатеринбурге
- Тема: OUT III: Делаем S-AWC на Outlander: репрограмминг блока AWC. Блок S-AWC от Mitsubishi Eclipse Cross на Mitsubishi Outlander
- OUT III: Делаем S-AWC на Outlander: репрограмминг блока AWC. Блок S-AWC от Mitsubishi Eclipse Cross на Mitsubishi Outlander
S-AWC — Миф или реальность
![]()
Изначально тема обсуждалась в разделе Outlander III, один из умельцев активировал индикацию работы S-AWC на приборке.
Сначала в этой теме разбираемся, что такое S-AWC на Outlander, а с 5-й страницы обсуждаем, что нужно для его установки на Outlander XL.
![]()
Индикация. Для полноценного S-AWC нужно железо, ACD/AYC, итп.
Видео посмотрел, забавно, надо поэкспериментировать.
![]()
Индикация. Для полноценного S-AWC нужно железо, ACD/AYC, итп.
Видео посмотрел, забавно, надо поэкспериментировать.
В России нет таких аутов, это раз.
Без аяка (AYC) нет перераспределния момента между задними колёсами, так что буковка S- чисто маркетинговый ход, если говорить о том полноценном S-AWC, который мицу седела в 2007 году, это два.
Вот могу напомнить, что представляет из себя полноценный канонический S-AWC:

http://www.mitsubishi-motors.com/en/. ary/s-awc.html
У тебя такая же система как и на раллиарте, там она называется скромно — AWC.
![]()
У меня тоже нет AYC, у меня управляется передний дифф (в кодинге Front differential: ELSD, Rear differential: Open)
И понятно, что на второй Аут активация скорее всего ничего не даст. Но смотри что про S-AWC в кодинге третьего: 
Фигушки. Вот оно что у меня:
к сожалению, изображение утрачено
Источник
Активация sawc митсубиси аутлендер 3
Россия, 620000, г.Екатеринбург, ул. Крупносортщиков 14
Бренды автомобилей

Вступайте в группу ВКонтакте, и узнавайте первым о скидках и акциях
Полезные статьи
Активация скрытых функций на Renault Arkana
На автомобилях Renault Arkana, точно так же как на Duster, Sandero, Logan есть ряд закрытых функций производителем.
ECO-Mode на Mitsubishi Outlander 3
Режим «ECO MODE» или «ЭКО» позволяет изменять режим работы двигателя для более экономичного расхода топлива.
Упрощённая система полного привода S-AWC для Mitsubishi Outlander 2.0 (2.4)
В отличие от аппаратной реализации системы S-AWC устанавливемой лишь на OUTLANDER с трёхлитровым двигателем (ныне в комплектации GT), где ставится активный передний дифференциал, данное исполнение является программным и позволяет блоку управления полным приводом работая в паре с блоком ABS/ASC помогать, например, проходить повороты ощутимо устойчивее. При этом в процессе движения на экране приборной панели производится индикация работы системы, дающая водителю некую обратную связь. На автомобилях выпущенных до 2018 года страница выглядит так:

Для выпущенных в 2018 году и более свежих автомобилях картинка уже более симпатичная:
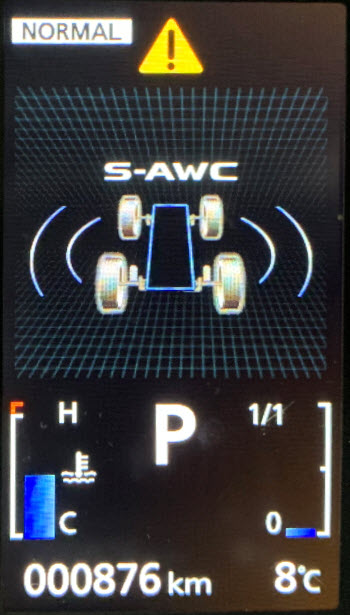
При входе в поворот на экране заполняются делениями соотвествующие зоны, например при левом повороте заполняются левая верхняя и правая нижняя. Выглядит это примерно так: 

После обновления вместо режимов 4WD ECO/4WD AUTO/4WD LOCK появляются режимы NORMAL/SNOW/LOCK.
Важно: Процесс обновления не требует демонтажа/монтажа каких-либо блоков, то есть не ставятся б/у блоки от других машин, соотвественно нет чужих VIN-номеров в узлах авто, нет аппаратного вмешательства в какие-либо части автомобиля, то есть всё остаётся родное, установленное с завода.
Бесплатное удаление катализаторов в Екатеринбурге
Обращаем ваше внимание, что при использовании данной услуги, вырезанный катализатор остаётся в сервисе у мастера.
Chipanem.ru / Чип-тюнинг в Екатеринбурге
Chipanem.ru — компания, которая занимается профессионально чип-тюнингом и активацией скрытых функций в Екатеринбурге. Чтобы записаться к нам, воспользуйтесь контактной информацией.
Номер телефона: +7 (963) 039-04-18
Электронная почта: info@chipanem.ru
Сообщество ВКонтакте: Чип-тюнинг и активация скрытых функции
Адрес: г.Екатеринбург, ул. Крупносортщиков 14
Источник
Тема: OUT III: Делаем S-AWC на Outlander: репрограмминг блока AWC. Блок S-AWC от Mitsubishi Eclipse Cross на Mitsubishi Outlander
Опции темы
OUT III: Делаем S-AWC на Outlander: репрограмминг блока AWC. Блок S-AWC от Mitsubishi Eclipse Cross на Mitsubishi Outlander
Блок S-AWC от Eclipse Cross на Outlander
Продолжаем доработку Аута, а именно хотел поделиться своими наблюдениями об установленном блоке
S-AWC (Super All Wheell Control), как на Eclipse Cross. В целом показалось что руль стал более острей, двигатель не тупит при проезде «лежачих полицейских». Экстремально в повороты входить не пробовал пока, но говорят теперь можно! Да в режиме AUTO теперь машина едет увереннее. теперь это режим SNOW
Так, что «новомодная коробка S-AWC» пока радует. Наблюдать за ее работай буду и дальше!
Новая кнопка переключения режимов полного привода
А, вот и сама коробка S-AWC
Информация для общего развития
Режимы теперь называются иначе
Навигатор по автомобилю и FAQ по системам для новичков и гостей форума:
- Путеводитель Mitsubishi Eclipse Cross==>>>
- Путеводитель Mitsubishi ASX, Peugeot 4008, Citroen C4 Aircross==>>>
- Путеводитель Mitsubishi Outlander XL, Peugeot 4007, Citroen C-Crosser==>>>
- Путеводитель Mitsubishi Outlander III (2013-2015MY)==>>>
- Путеводитель Mitsubishi Outlander IV (2015-2019MY)==>>>
Citroen C-Crosser 3.0 V6 (240 hp, 330 Nm) AT , tuning by Musketier — черный — *787*190
Кратко — можно накатить прошивку от блока S-AWC Mitsubishi Eclipse Cross на блок AWC Mitsubishi Outlander и получите S-AWC

После прошивки не будет режима Eco/2WD. Машина будет с постоянным полным приводом — управление моментом между осями через электромуфту заднего моста.

Навигатор по автомобилю и FAQ по системам для новичков и гостей форума:
- Путеводитель Mitsubishi Eclipse Cross==>>>
- Путеводитель Mitsubishi ASX, Peugeot 4008, Citroen C4 Aircross==>>>
- Путеводитель Mitsubishi Outlander XL, Peugeot 4007, Citroen C-Crosser==>>>
- Путеводитель Mitsubishi Outlander III (2013-2015MY)==>>>
- Путеводитель Mitsubishi Outlander IV (2015-2019MY)==>>>
Citroen C-Crosser 3.0 V6 (240 hp, 330 Nm) AT , tuning by Musketier — черный — *787*190
Система Mitsubishi S-AWC: от концепта в реальность. Немного о эволюции системы
S-AWC (Super All Wheel Control) is the brand name of an advanced full-time four-wheel drive system developed by Mitsubishi Motors. The technology, specifically developed for the new 2007 Lancer Evolution, the 2010 Outlander (if equipped), the 2014 Outlander (if equipped), the Outlander PHEV and the Eclipse Cross have an advanced version of Mitsubishi Motors’ AWC system. Mitsubishi Motors first exhibited S-AWC integration control technology in the Concept-X model at the 39th Tokyo Motor Show in 2005.[4] According to Mitsubishi Motors, «the ultimate embodiment of the company’s AWC philosophy is the S-AWC system, a 4WD-based integrated vehicle dynamics control system».
It integrates management of its Active Center Differential (ACD), Active Yaw Control (AYC), Active Stability Control (ASC), and Sports ABS components, while adding braking force control to Mitsubishi Motors’ own AYC system, allowing regulation of torque and braking force at each wheel. S-AWC employs yaw rate feedback control, a direct yaw moment control technology that affects left-right torque vectoring (this technology forms the core of S-AWC system) and controls cornering maneuvers as desired during acceleration, steady state driving, and deceleration. Mitsubishi Motors claims the result is elevated drive power, cornering performance, and vehicle stability regardless of driving conditions.
Components
Active Center Differential (ACD)
Active Center Differential incorporates an electronically-controlled hydraulic multi-plate clutch. The system optimizes clutch cover clamp load for different driving conditions, regulating the differential limiting action between free and locked states to optimize front/rear wheel torque split and thereby producing the best balance between traction and steering response.
Active Yaw Control (AYC)
Active Yaw Control uses a torque transfer mechanism in the rear differential to control rear wheel torque differential for different driving conditions and so limit the yaw moment that acts on the vehicle body and enhance cornering performance. AYC also acts like a limited slip differential by suppressing rear wheel slip to improve traction. In its latest form, AYC now features yaw rate feedback control using a yaw rate sensor and also gains braking force control. Accurately determining the cornering dynamics on a realtime basis, the system operates to control vehicle behavior through corners and realize vehicle behavior that more closely mirrors driver intent.
Active Stability Control (ASC)
Active Stability Control stabilizes vehicle attitude while maintaining optimum traction by regulating engine power and the braking force at each wheel. Taking a step beyond the previous generation Lancer Evolution, the fitting of a brake pressure sensor at each wheel allows more precise and positive control of braking force. ASC improves traction under acceleration by preventing the driving wheels from spinning on slippery surfaces. It also elevates vehicle stability by suppressing skidding in an emergency evasive maneuver or the result of other sudden steering inputs.
Sport ABS
The Sports ABS system supports braking when entering into a corner by controlling power to all tyres depending on handling characteristics. Braking can be controlled to obtain optimal damping at each tyre based on information from four wheel-speed sensors and steering wheel angle sensor. The addition of yaw rate sensors and brake pressure sensors to the Sport ABS system has improved braking performance through corners compared to the Lancer Evolution IX.
Concept components for 2007 Lancer Evolution
The prototype system also featured two additional components controlling suspensions and steering, which failed to make the production version of S-AWC system:
— Active Steering System
— Roll Control Suspension (RCS)
Active Steering System realizes handling with more linear response by adaptively controlling front wheel turn angle according to steering input and vehicle speed. At slower vehicle speeds the system improves response by shifting to a quicker steering gear ratio, while at higher speeds it substantially improves stability by moving to a slower gear ratio. For rapid steering inputs, S-AWC momentarily increases front wheel turn angle and Super AYC control to realize sharper response. In countersteer situations, S-AWC increases responsiveness further to assist the driver with steering precision.
RCS effectively reduces body roll and pitching by hydraulically connecting all the shock absorbers together and regulating their damping pressures as necessary. Able to control both roll and pitching stiffness separately, RCS can operate in a variety of ways. It can, for example, reduce roll only when required during turn in or in other situations while being set up on the soft side to prioritize tire contact and ride comfort. Since the system controls roll stiffness hydraulically, it eliminates the need for stabilizer bars. In the integrated control of its component systems, S-AWC employs information from RCS’s hydraulic system to estimate the tire load at each wheel.
Control system
The use of engine torque and brake pressure information in the regulation of the ACD and AYC components allows the S-AWC system to determine more quickly whether the vehicle is accelerating or decelerating. S-AWC also employs yaw rate feedback for the first time. The system helps the driver follow his chosen line more closely by comparing how the car is running, as determined from data from the yaw rate sensors, and how the driver wants it to behave, as determined from steering inputs, and operates accordingly to correct any divergence. The addition of braking force regulation to AYC’s main role of transferring torque between the right and left wheels allows S-AWC to exert more control over vehicle behavior in on-the-limit driving situations. Increasing braking force on the inside wheel during understeer and on the outer wheel during oversteer situations, AYC’s new braking force control feature works in conjunction with torque transfer regulation to realize higher levels of cornering performance and vehicle stability.
Using integrated management of the ASC and ABS systems allows S-AWC to effectively and seamlessly control vehicle dynamics when accelerating, decelerating or cornering under all driving conditions. S-AWC offers three operating modes:
- Tarmac for dry, paved surfaces;
- Gravel for wet or unmade surfaces;
- Snow for snow-covered surfaces.
When the driver selects the mode best suited to current road surface conditions S-AWC operates to control vehicle behavior accordingly and allow the driver to extract the maximum dynamic performance from his vehicle.
ECU integration
Two electronic control units (ECU) regulate vehicle motion. One is an ECU developed by Mitsubishi Electric to control ACD and AYC. The other is an ECU developed by Continental Automotive Systems of Germany that controls ASC and ABS. The two ECUs can communicate with other ECUs through a CAN, an in-vehicle LAN interface standard. In addition, the two ECUs are communicating with each other through a dedicated CAN, enabling vehicle motion to be controlled more quickly. The cable and communication standard for the dedicated CAN are the same as those for other CANs.
A longitudinal acceleration sensor, lateral acceleration sensor and yaw rate sensor are installed as one module near the gravity center of a vehicle, which is located between the driver’s and passenger’s seats. Other sensors, such as a wheel-speed sensor and steering-angle sensor, are installed in different places. However, no vertical acceleration sensor is used.
Also, when the vehicle is equipped with Mitsubishi’s Twin Clutch SST transmission, S-AWC analyzes the behavior of the turning vehicle and if it judges that it is safer not to shift gears, it sends a signal to tell Twin Clutch SST that the gear must not be changed. However, S-AWC does not control vehicle motion by using control information from Twin Clutch SST. The co-operation is a one-way communication.
The control algorithms of vehicle motion were developed by Mitsubishi in-house, with MATLAB and Simulink: control system modeling tools. Mitsubishi adopted model-based method, which combines an algorithm and physical model of a vehicle to run a simulation. The physical model of a vehicle was constructed with CarSim, a simulation-package software developed by Mechanical Simulation Corporation of the United States. The algorithms were developed for each function such as ACD and AYC, not for each vehicle type. Therefore, the algorithms can be employed by various types of vehicles.
Concept components for 2010 Outlander
The 2010MY Outlander adopts a new S-AWC (Super All Wheel Control) that has added and refined an active front differential that controls the differential limiting force of the left and right front wheels based on an electronically controlled 4WD that distributes drive force to the rear wheels and integrates this Active Stability Control (ASC) and ABS. The result is greater turning performance, stability and drive performance while maintaining fuel economy equal to traditional electronically-controlled 4WD.
Structure
The S-AWC ECU calculates the amount of control according to drive condition and vehicle behavior based on sensor and switch data and ECU operation data. Control instructions are sent to the active front diff and electronic control couplings.
Active control differential
Electronically-controlled couplings used in electronic –control 4WD are located in the transfer case to limit differential between the front left and right wheels and control drive force distribution on either side.
Electronic control coupling
An electronic control coupling within the rear differential distributes drive force to the rear wheels according to driving conditions. This is the same as used for 4WD electronic control in the 2009 model Outlander
S-AWC ECU
The optimal amount of drive force control is calculated from sensor information obtained from CAN communications etc. to control the active front diff and the electronically-controlled coupling. Compared with the 2009 Outlander, Microcomputer performance has been enhanced and calculation speed and accuracy have been improved.
Sensor information
Compared with electronically-controlled 4WD, sensor information has been significantly augmented to accurately assess vehicle driving conditions and realize highly-responsive, finely tuned control.
S-AWC control mode switch
S-AWC in the 2010 model Outlander has three selectable modes of control (NORMAL/SNOW/OFFROAD) that have been tuned to suit the road surface. Making the switch according to road surface conditions enables proper control.
Indicator
S-AWC control information will be constantly displayed on the upper level of the multi-information display. A dedicated screen has been provided to display S-AWC operation information. The center displays traction control condition while yaw movement control conditions are displayed on either side.
Control
Changes to the 2009 Outlander’s electronically-controlled 4WD.
1) Addition of integrated control with the active front differential
In addition to front and rear drive force distribution, enabling integrated control of drive force distribution to both front wheels delivers a higher level of driving on all fronts (turning performance, stability and road performance) compared with the 2009 Outlander:
2) Introduction of a yaw rate feedback control
Vehicle behavior faithful to drive input is realized by precise assessment of vehicle turning movement based on yaw rate sensor data and the provision of achieve close to target vehicle behavior obtained from speed and steering angle.
3) Evolution of coordinated ASC/ABS control
Properly controlling active front differential and electronically controlled coupling according to the operating status of ASC and ABS, improves turning performance and stability.
Concept components for 2014 Outlander
Following function newly added.
Brake control
When the under steer condition, the beginning of turning response by steering operation is dramatically improved by adding the brake force to the inner wheel.
In addition, the wheel slippage is reduced during start moving.
EPS control
Suppress the steering wheel movement which generated by the slippery road.
As a result, the traction performance improves because the amount of the control of Active Front Differential (AFD) can be increased.
Synchronized with ECO MODE
By selecting the ECO MODE, Engine and climate control are controlled as a “ECO mode”. Likewise, S-AWC control also turn to AWC ECO.
At the result of these control, Eco driving condition is easy to prepare for the driver.
Control
S-AWC Control Mode
By pushing S-AWC Control switch, the control mode can be changed.
Concept components for Outlander PHEV
Fail-safe function
Fault detection
The ECU performs the following checks at the appropriate moment. The ECU determines that a fault has occurred when the fault detection conditions are met. Then the ECU stores the diagnosis code and ensures that the vehicle can still be driven. When the failure resume conditions are met, ECU determines the status is normal, and resumes the system. Start-up (Initial check immediately after the power supply mode of the electric motor switch is turned on.)
• CPU check
• Performs the ROM and RAM checks.
Always (while the power supply mode of the electric motor switch is turned on except during initial check)
1. CPU check
• Performs CAN communication and interactive check between CPUs.
2. Power supply check
• Monitors the CPU supply voltage and checks if the voltage is within specifications.
3. External wire connection check
• Checks if the input and output of each external wire connection is open or shorted.
4WD lock switch
The 4WD lock switch is located on the floor console. When the 4WD lock switch is pressed with the electric motor switch ON, «4WD LOCK» will be turned on and off. When the 4WD lock switch is turned on with the drive mode at ECO, or the ECO mode switch is turned on with the drive mode at 4WD lock, the drive mode will be switched to «ECO MODE/4WD LOCK». The driver can obtain better ground-covering ability by choosing the drive mode between «4WD LOCK» and «ECO MODE/4WD LOCK». When the ECO mode switch is turned off, the drive mode will return from «ECO MODE/4WD LOCK» to «4WD LOCK».
Cornering Performance
Enhancement of the cornering stability
It is optimization of the torque distribution ratio between front and rear wheels when cornering. In order to keep the cornering stability against the direction of steering wheel on the slippery road.
Enhancement of the vehicle maneuverability
The optimization of the control value for the AYC (Active Yaw Control) with braking, in order to enhance the vehicle maneuverability.
Traction performance
Launching performance on the icy slope is enhanced.
Навигатор по автомобилю и FAQ по системам для новичков и гостей форума:
- Путеводитель Mitsubishi Eclipse Cross==>>>
- Путеводитель Mitsubishi ASX, Peugeot 4008, Citroen C4 Aircross==>>>
- Путеводитель Mitsubishi Outlander XL, Peugeot 4007, Citroen C-Crosser==>>>
- Путеводитель Mitsubishi Outlander III (2013-2015MY)==>>>
- Путеводитель Mitsubishi Outlander IV (2015-2019MY)==>>>
Citroen C-Crosser 3.0 V6 (240 hp, 330 Nm) AT , tuning by Musketier — черный — *787*190
Источник

